
Quartz accelerometer is a kind of classical high-precision mechanical pendulum accelerometer with simple structure and small size, which is widely used in aerospace and other fields, and its performance directly affects the entire inertial navigation system. Stability is an important index of the accelerometer, so the research on the stability of the quartz accelerometer head has important theoretical significance and application value, whether in the design of the structure of the accelerometer head or the design of the detection circuit.
Force analysis of pendulum plate under acceleration
When the quartz flexible accelerometer is subjected to axial acceleration a, the pendulum plate component produces a certain deflection angular displacement under the action of inertia force, and its dynamic equation can be expressed as:
In the formula, θ is the Angle of the relative balance position of the pendulum component; J is the moment of inertia of the pendulum component; C is the air damping coefficient; K is the stiffness of the pendulum component; M is applied torque; mL is pendulum.
The pendulum assembly is fixed on the fixed ring of the outer ring by beam. Because the pendulum assembly is flexible in the direction of the sensitive axis and rigid in the other direction, the pendulum assembly can be regarded as a cantilever beam model. As shown in Figure , the deflection Angle of the pendulum component is θ. If the pendulum component is subjected to a vertical axial acceleration a’, the acceleration component of a’ in the plane direction of the vertical pendulum component is A ‘sinθ, and the acceleration component acting on the pendulum component will affect the restoring force of the pendulum component.
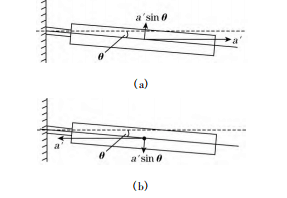
In Figure (a), the component of vertical axial acceleration in the plane direction of the vertical pendulum points to the balance position of the pendulum, and the restoring force of the pendulum component increases, which can be equivalent to the stiffness of the pendulum component increasing K’. The dynamic equation is shown as follows:
In Figure (b), the component of vertical axial acceleration in the vertical pendulum plane direction deviates from the balance position of the pendulum, and the restoring force of the pendulum component decreases, which can be equivalent to the stiffness of the pendulum component decreasing K’. The dynamic equation is shown as follows:
![]() It can be seen from the above that when the vertical axial acceleration in the vertical pendulum plane direction points to the equilibrium position, the equivalent stiffness of the pendulum component increases, and the pendulum component easily returns to the equilibrium position. When the vertical axial acceleration deviates from the equilibrium position in the vertical pendulum plane direction, the equivalent stiffness of the pendulum component decreases and the pendulum component cannot easily return to the equilibrium position.
It can be seen from the above that when the vertical axial acceleration in the vertical pendulum plane direction points to the equilibrium position, the equivalent stiffness of the pendulum component increases, and the pendulum component easily returns to the equilibrium position. When the vertical axial acceleration deviates from the equilibrium position in the vertical pendulum plane direction, the equivalent stiffness of the pendulum component decreases and the pendulum component cannot easily return to the equilibrium position.
The stability of the meter head affects the test method
The open-loop characteristic of the system is an important basis for system design. By studying the open-loop characteristic of the meter head, the characteristic parameters of the meter head can be obtained. In order to study the effect of vertical axial acceleration on the stability of quartz accelerometer, an open-loop step experiment was used. In order to ensure that the influence of other factors on the experiment is excluded, the quartz flexible accelerometer head axial acceleration is 0 and the vertical axial acceleration is g.
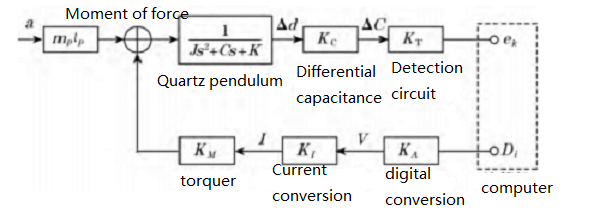 The principle of the open-loop step experiment of the watch head is shown in the figure. First, adjust the accelerometer to the closed-loop state, then keep the digital quantity Di of the digital-to-analog converter unchanged and put the system in the open-loop state, and then fine-tune Di to make the output ek of the differential capacitance detection circuit = 0. At this time, the differential capacitance is 0 and the quartz pendulum is in the balance position. Record that the value of Di is Di0. Take Di = Di0 and ek = 0 as the zero of input and output, and start from time t = 0, let Di = Di0 +Δd, where Δd is the digital quantity of the digital-to-analog converter corresponding to the step excitation; From t = 0 to the stabilization of the system, note the output ek =Δek of the differential capacitance detection circuit, then Δek is the open-loop response of the meter head under the excitation of Δd.
The principle of the open-loop step experiment of the watch head is shown in the figure. First, adjust the accelerometer to the closed-loop state, then keep the digital quantity Di of the digital-to-analog converter unchanged and put the system in the open-loop state, and then fine-tune Di to make the output ek of the differential capacitance detection circuit = 0. At this time, the differential capacitance is 0 and the quartz pendulum is in the balance position. Record that the value of Di is Di0. Take Di = Di0 and ek = 0 as the zero of input and output, and start from time t = 0, let Di = Di0 +Δd, where Δd is the digital quantity of the digital-to-analog converter corresponding to the step excitation; From t = 0 to the stabilization of the system, note the output ek =Δek of the differential capacitance detection circuit, then Δek is the open-loop response of the meter head under the excitation of Δd.
When the head is horizontal in the gravitational field and the direction of the sensitive axis is perpendicular to the direction of the gravitational acceleration, the axial acceleration of the head is 0 and the vertical axial acceleration is g at rest. Rotate the watch head around the sensitive axis to the position as shown in FIG(a), with the pendulum plate assembly facing down and the Angle of 0° from the direction of gravitational acceleration, superimpose a step acceleration on the direction of the sensitive axis of the watch head, and measure the response of the watch head to step acceleration; Then rotate the watch head to the position as shown in FIG(b), with the pendulum component facing upward and the Angle of 180°from the direction of gravitational acceleration, superimpose the same step acceleration on the direction of the sensitive axis of the watch head, and measure the response of the watch head to step acceleration under this condition.
Summary
The watch head is subjected to vertical axial acceleration, when the component of the acceleration in the plane direction of the vertical pendulum points to the balance position of the quartz pendulum, the pendulum amplitude decreases and the stability increases. When the component of the acceleration in the plane direction of the vertical pendulum deviates from the balance position of the quartz pendulum, the swing amplitude of the pendulum increases and the stability becomes worse. ERICCO‘s ER-QA-03A is the representative of the high-precision quartz accelerometer, and its head structure design can better play the characteristics of the material and ensure the accuracy in the application.
Copyright:@2020-2021

Comments Please sign in or sign up to post.
0
0 of 500 characters used